Curiosity Navigation Curiosity Home Mission Overview Where is Curiosity? Mission Updates Science Overview Instruments Highlights Exploration Goals News and Features Multimedia Curiosity Raw Images Images Videos Audio Mosaics More Resources Mars Missions Mars Sample Return Mars Perseverance Rover Mars Curiosity Rover MAVEN Mars Reconnaissance Orbiter Mars Odyssey More Mars Missions Mars Home 2 min read
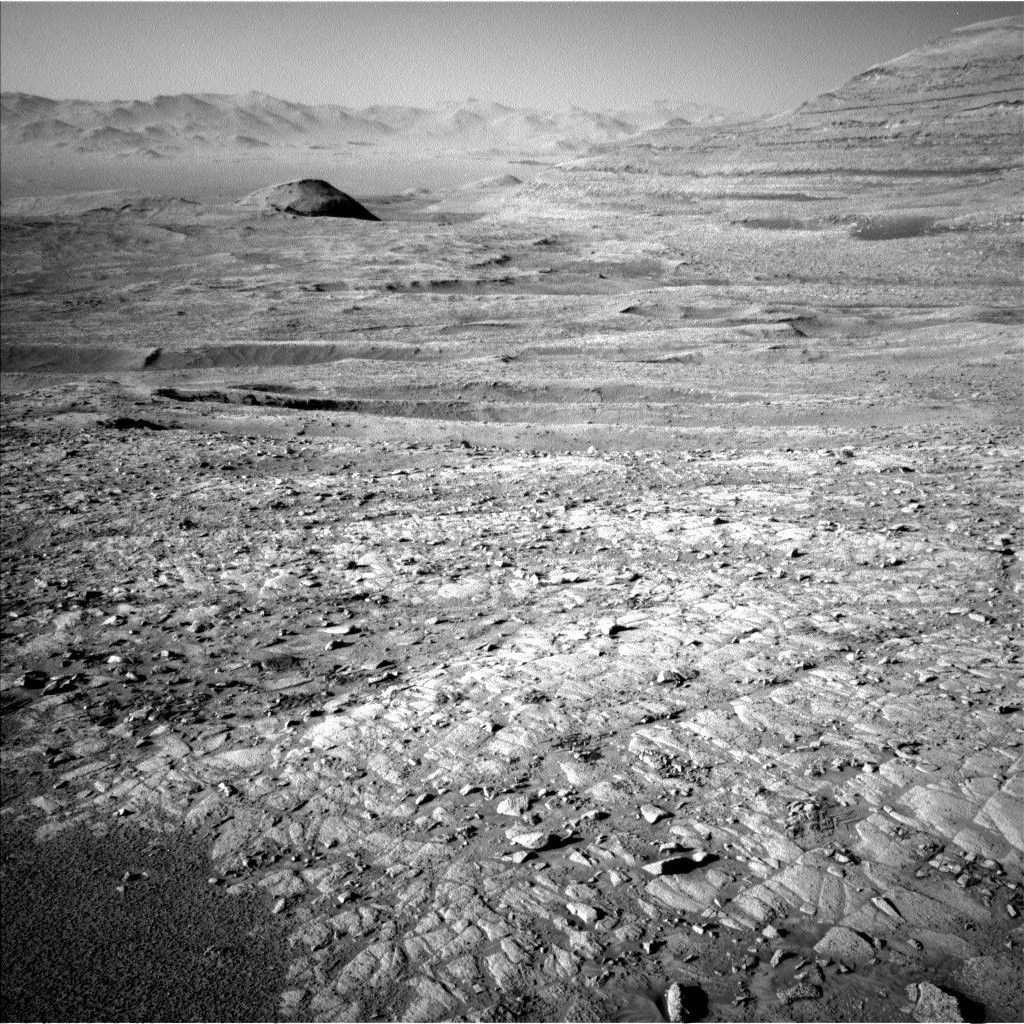
Curiosity Blog, Sols 4631-4633: Radiant Ridge Revolution 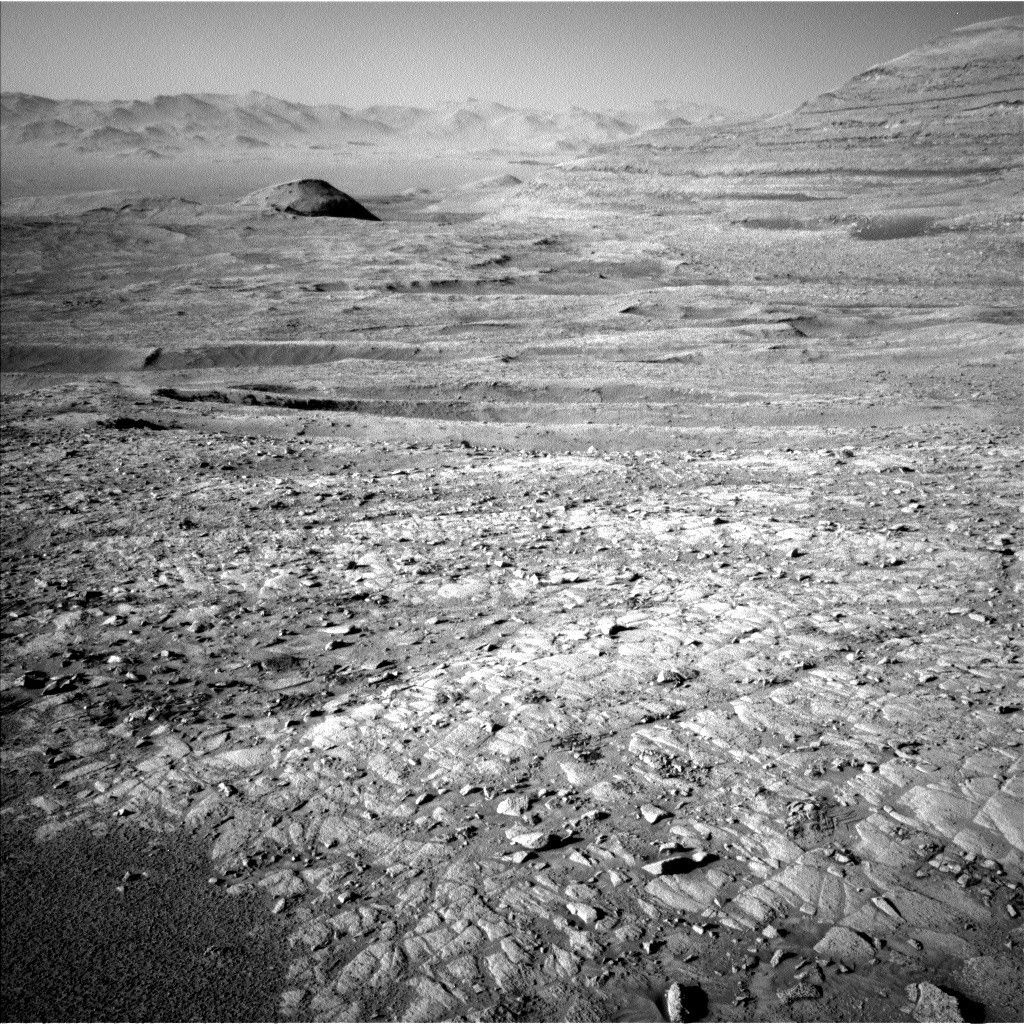 NASA’s Mars rover Curiosity acquired this image using its Left Navigation Camera on Aug. 14, 2025 — Sol 4629, or Martian day 4,629 of the Mars Science Laboratory mission — at 12:11:32 UTC. NASA/JPL-Caltech Written by Remington Free, Operations Systems Engineer at NASA’s Jet Propulsion Laboratory
NASA’s Mars rover Curiosity acquired this image using its Left Navigation Camera on Aug. 14, 2025 — Sol 4629, or Martian day 4,629 of the Mars Science Laboratory mission — at 12:11:32 UTC. NASA/JPL-Caltech Written by Remington Free, Operations Systems Engineer at NASA’s Jet Propulsion Laboratory
Earth planning date: Friday, Aug. 15, 2025
Today we uplinked a three-sol weekend plan with lots of exciting activities — to support both the science and engineering teams!
While usually our science activities take front and center stage, we often also do engineering maintenance activities as well to maintain the mechanisms and engineering health state of the rover. On Sol 4631, we planned a maintenance activity of our Battery Control Boards (BCBs) which are electronic control boards attached to the rover’s batteries and are what let us interact with the batteries as needed. This maintenance is done periodically to correct for any time drift on the BCBs, so we get as accurate of data as possible.
On this sol, we also did a dump of all of our parameters — these are essentially variables set onboard the rover which serve as inputs to a variety of functions. Occasionally we send a list of all these variables back down to the ground so we can verify they match as expected. We don’t want to have set a value and then forget about it!
We, of course, also did science activities on this sol. After completing our engineering activities, we started off with some remote science; this included Mastcam imaging and ChemCam measurements of several interesting targets. These were chosen in order to assess variability within the “Cerro Paranal” ridge within view, and to document any layering or fractures in the rock. We then completed several arm activities in order to get more information on these targets through the use of our APXS spectrometer.
On Sol 4632, we planned some remote atmospheric science, including a Navcam dust-devil survey, a Mastcam tau (measurement of the atmospheric opacity), APXS atmospheric observations, and more imaging of some of the ridge targets we looked at in the previous sol.
On Sol 4633, we continued with more science imaging, including a horizon movie using Navcam and a dust-devil movie, before proceeding into our drive. We planned a drive of about 19 meters (about 62 feet) to the south, along the eastern edge of Cerro Paranal. After the drive, it is then standard for us to take new imaging of our new location. We’re excited to get these science images back and to hear how the drive went when the team comes back on Monday!
Want to read more posts from the Curiosity team?
Visit Mission Updates
Want to learn more about Curiosity’s science instruments?
Visit the Science Instruments page
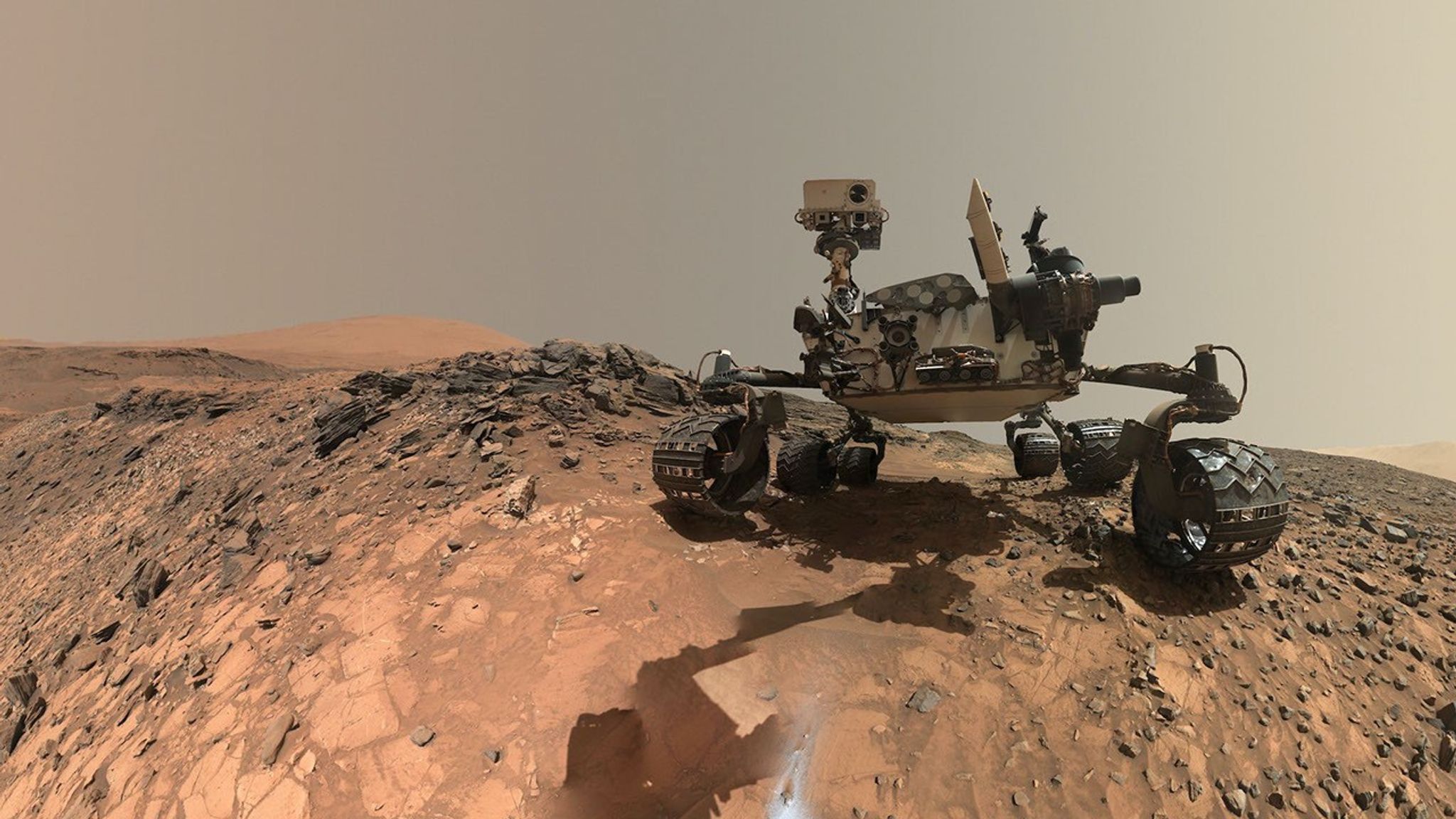 NASA’s Mars rover Curiosity at the base of Mount Sharp NASA/JPL-Caltech/MSSS
NASA’s Mars rover Curiosity at the base of Mount Sharp NASA/JPL-Caltech/MSSS
Details Last Updated Aug 19, 2025 Related Terms Blogs
 2 min read Curiosity Blog, Sols 4629-4630: Feeling Hollow
2 min read Curiosity Blog, Sols 4629-4630: Feeling Hollow
Article
2 days ago
 2 min read Curiosity Blog, Sols 4627-4628: A Ridge Stop in the Boxworks
2 min read Curiosity Blog, Sols 4627-4628: A Ridge Stop in the Boxworks
Article
5 days ago
 2 min read Curiosity Blog, Sols 4624-4626: A Busy Weekend at the Boxwork
2 min read Curiosity Blog, Sols 4624-4626: A Busy Weekend at the Boxwork
Article
7 days ago
Keep Exploring Discover More Topics From NASA Mars
Mars is the fourth planet from the Sun, and the seventh largest. It’s the only planet we know of inhabited…

Explore this collection of Mars images, videos, resources, PDFs, and toolkits. Discover valuable content designed to inform, educate, and inspire,…

Each robotic explorer sent to the Red Planet has its own unique capabilities driven by science. Many attributes of a…
Mars Exploration: Science Goals
The key to understanding the past, present or future potential for life on Mars can be found in NASA’s four…

