OLHZN-13 was the thirteenth high altitude weather balloon flight for Overlook Horizon High Altitude Balloons. This flight launched on May 28, 2018 at 3:21pm EDT (19:21 UTC) and carried 3 onboard Lightdow LD4000 Cameras along with our new micro-payload that was introduced on OLHZN-10. This flight also utilized our new on-board landing prediction software that was introduced on OLHZN-12 and allows the payload to provide predictions of its own landing site ahead of time and relay that information to the ground crew (and anyone following our live flight map) to get our chase team as close as possible to the landing site as the balloon descended.
Flight Day Story
OLHZN-13 was our fastest turnaround to another flight with only 1 day in between this flight and OLHZN-12. For that reason, this meant that this flight configuration was an exact replica of OLHZN-12 with only minor tweaks being made to the software platform, mostly in regards to our new landing prediction software. This flight day was our intended backup launch day for OLHZN-12 and turned out to be a beautiful day with partly cloudy skies – what we expected to have during OLHZN-12. Rather than pass on the opportunity, we decided to fly during our backup window with another flight under the same configuration.
The launch procedures proceeded normally up until we reached the power on sequence for the micro-payload. The micro-payload took a direct and hard impact with the ground upon landing during OLHZN-12. During our initial brief inspection, the damage appeared to be purely cosmetic, however, it was determined that the through-hole mounts were damaged on the GPS board meaning that the micro-payload was unable to obtain a GPS signal with coordinates and altitude. We decided to proceed with the flight anyways. Even with the micro-payload unable to obtain a valid GPS signal, it would still attempt to transmit its position so we could still test if the new guitar wire antenna would be able to operate throughout the entire flight. This proved successful as the micro-payload did transmit through the entire flight with temperature readings, pressure readings and humidity readings, but the latitude, longitude and altitude were all transmitted as zeros throughout the entire flight.
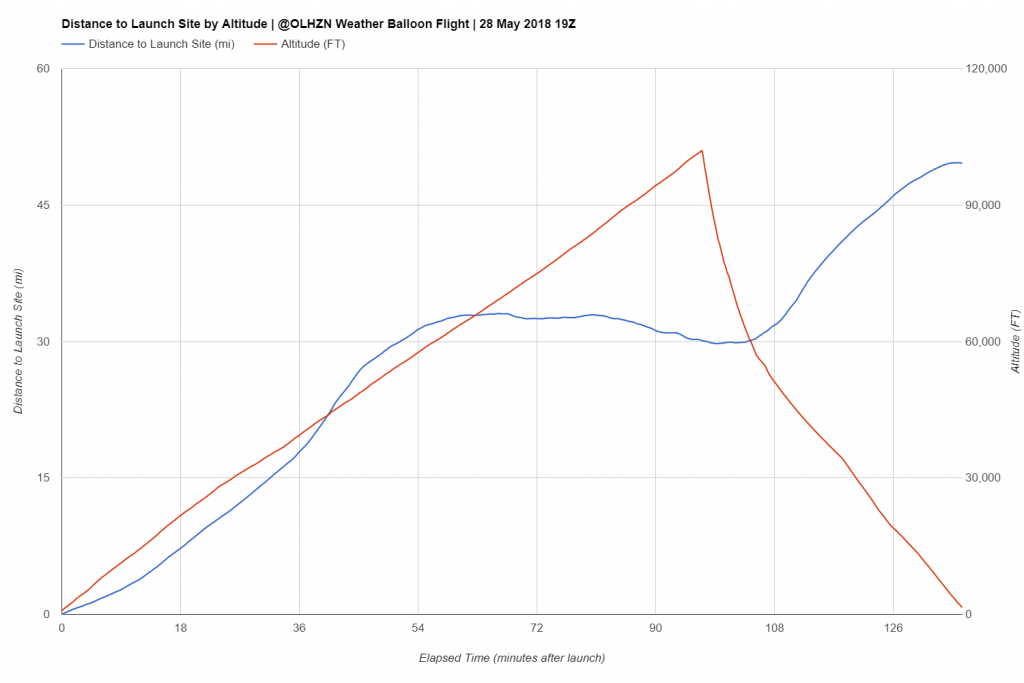
Our landing prediction software operated very well on this flight. The initial predictions just after balloon burst were about 4.5 miles from the actual landing location. This is fantastic and leaves our recovery team plenty of time to adjust and get into position for landing. By about 15 minutes prior to landing, the landing predictor had the landing site dialed in to about 2500 feet which is amazing and great for recovery efforts. We look forward to tweaking this a little more for even better accuracy.
The recovery on this flight proved to be very difficult as the payload landed high in a tree in the middle of the Summer Hill State Forest. It was about a 15 to 20 minute hike out to the landing location upon which we discovered that the payload was caught about 75 feet up in a relatively small tree. We attempted to use our new pneumatic air cannon to fire a recovery string up to the payload, but this is the first time we’ve employed that method and it proved to be difficult to manage in the unpredictable forest terrain which constantly snagged the recovery string and made it inefficient. We have some ideas to improve this on future attempts, if needed. Eventually, after about 3 hours, we were able to utilize a leaning nearby tree to snag the payload and pull it down to the ground. Special thanks to our new friend, Len, who helped us out with entering & exiting the forest with his awesome all-terrain vehicle.



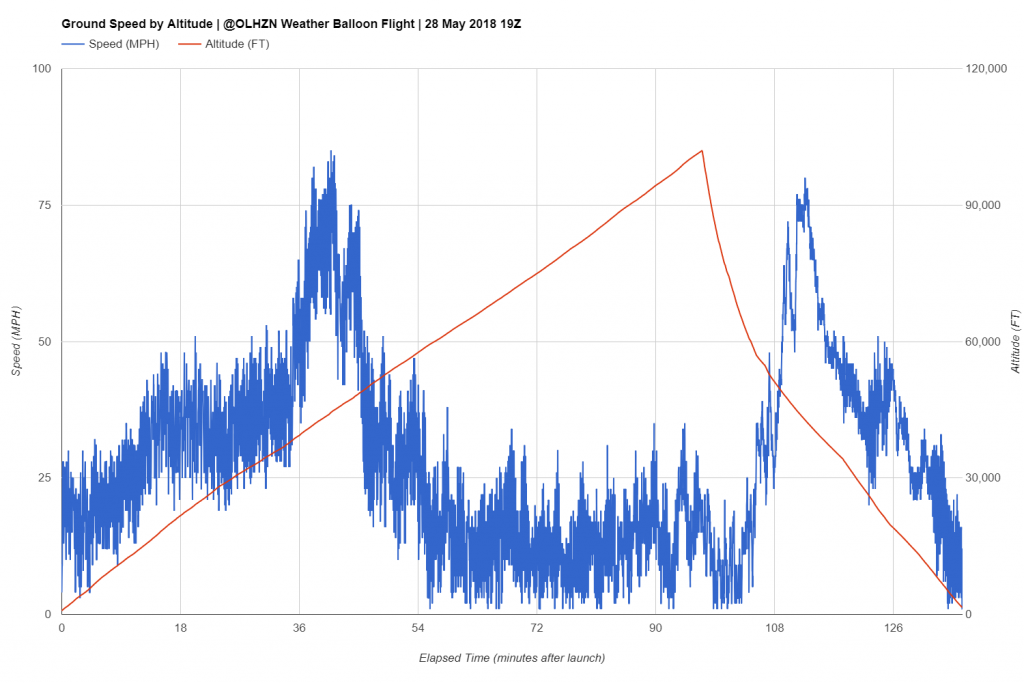
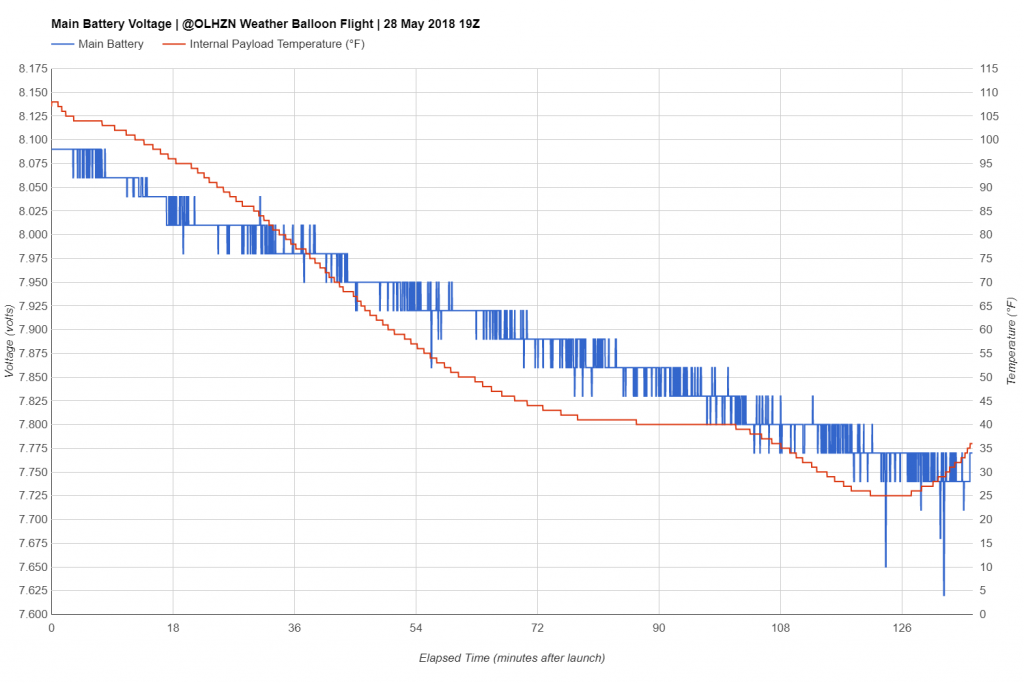
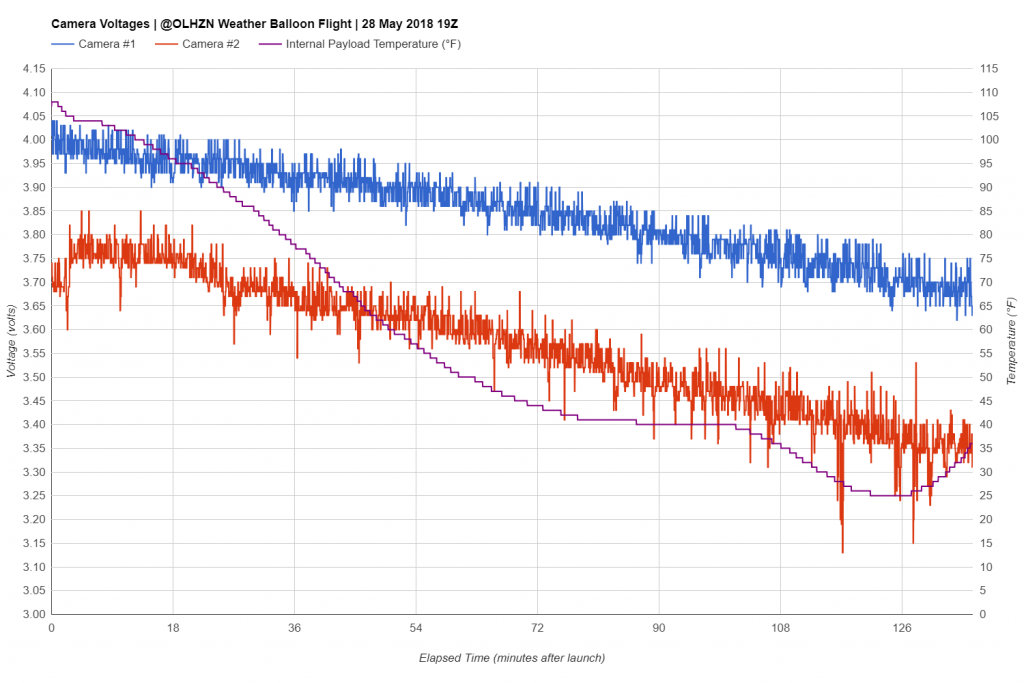
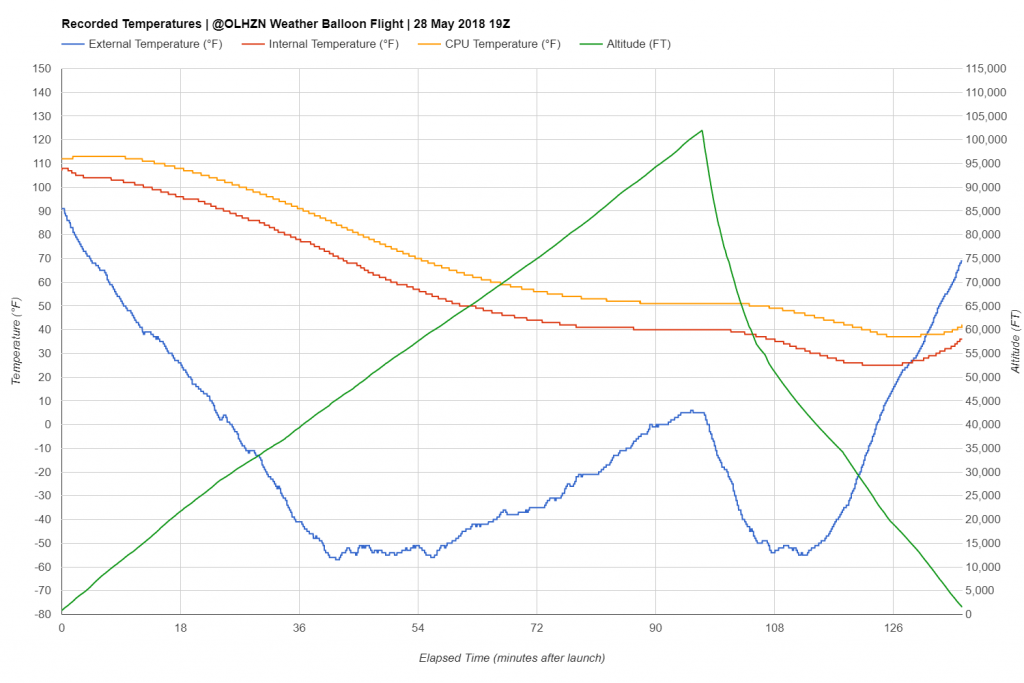
Collected Data Graphs
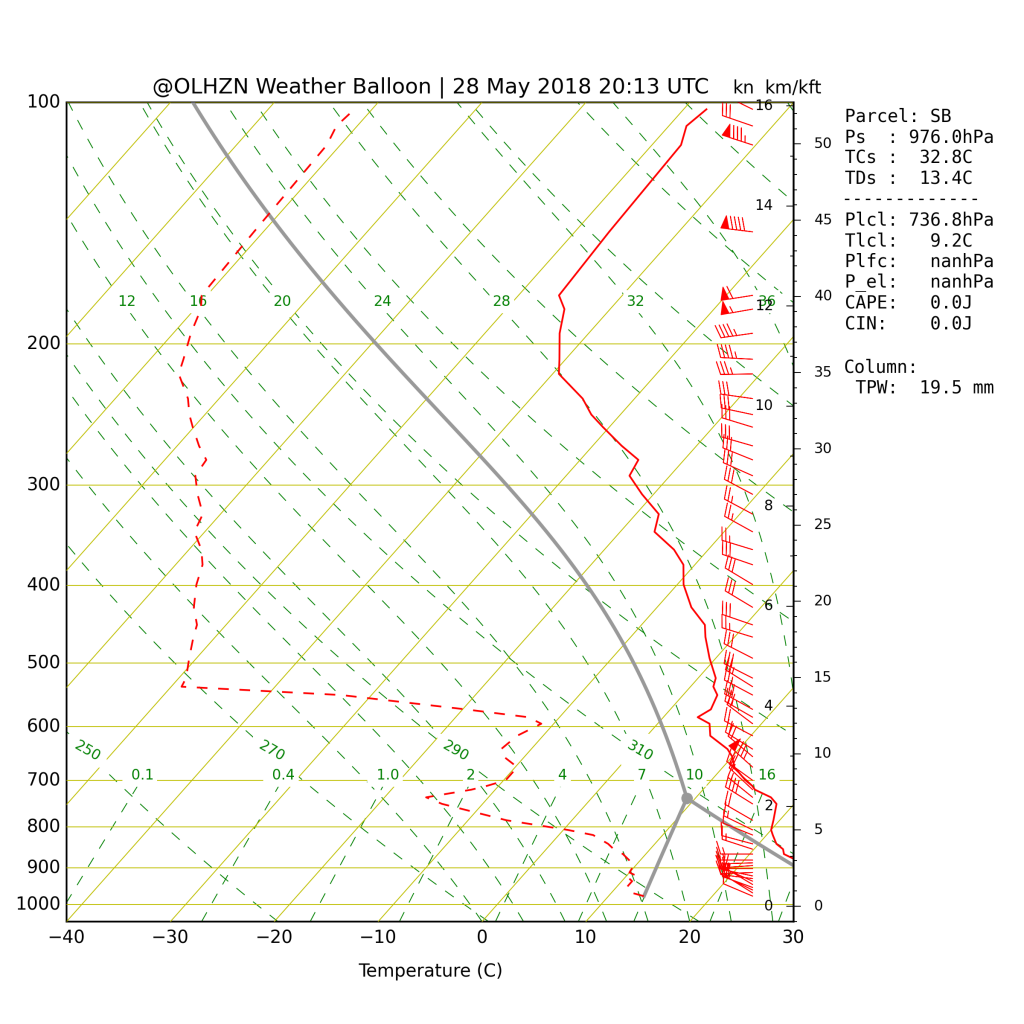
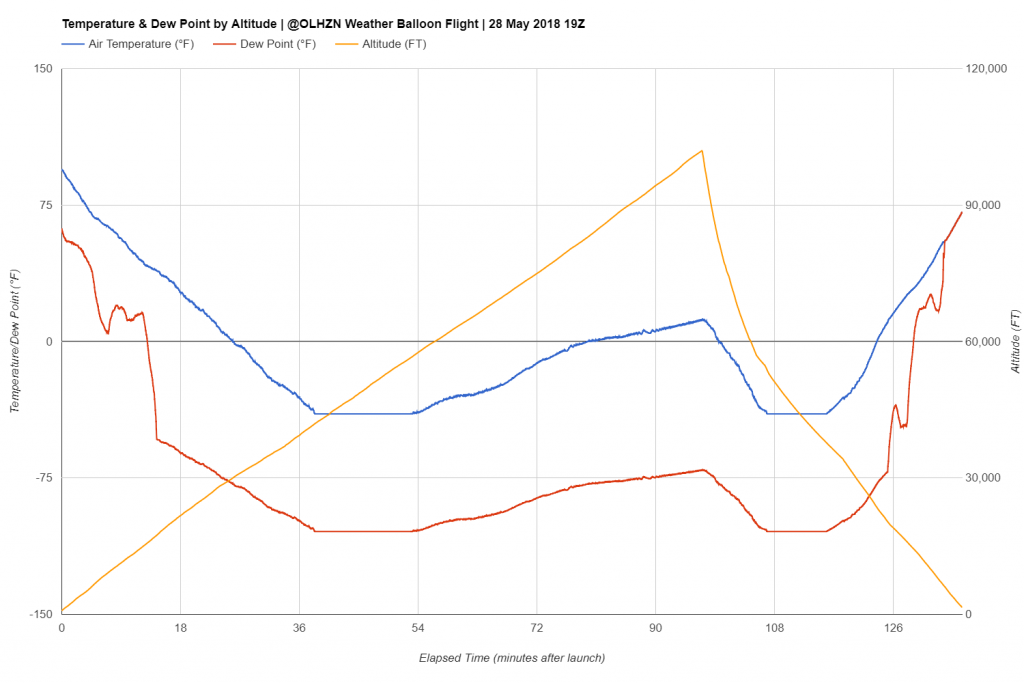
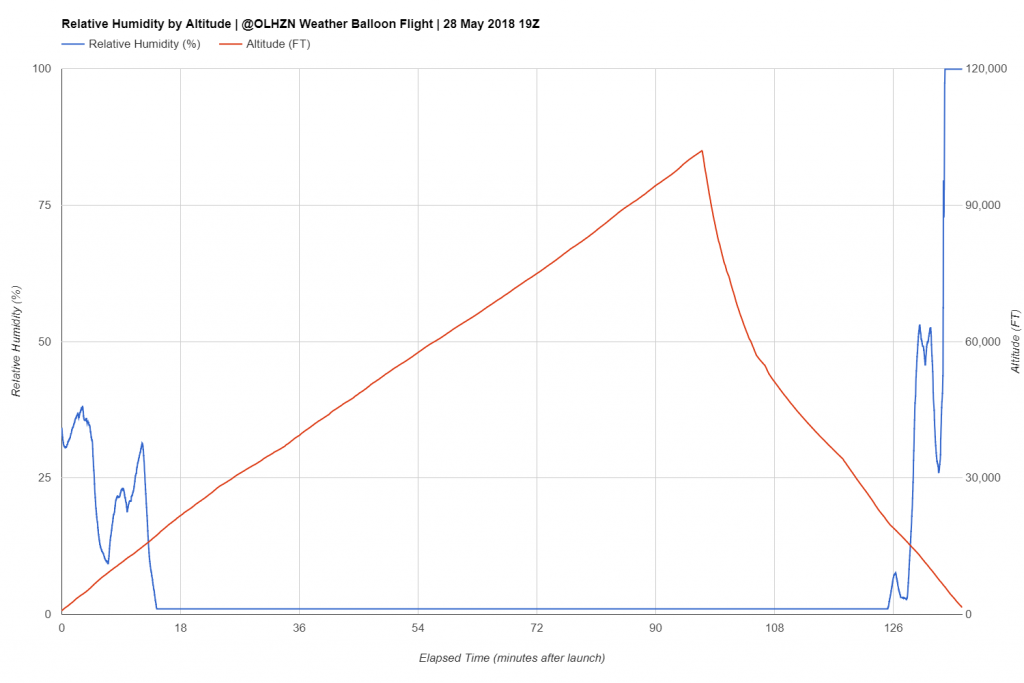
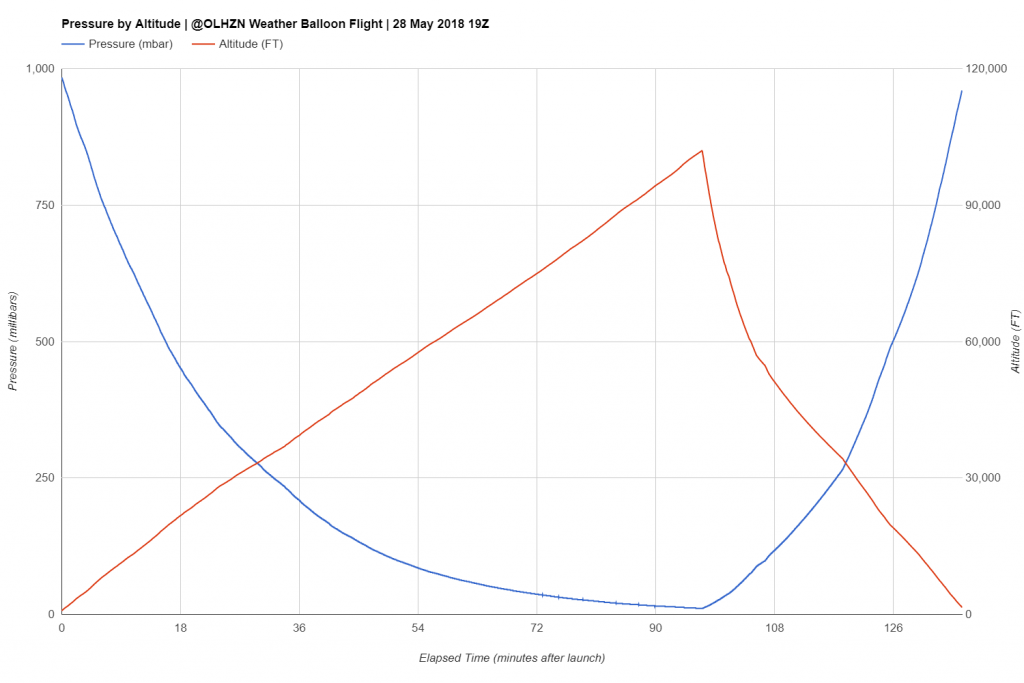
The Skew-T graph was generated from our main on-board flight computer that measures atmospheric conditions in 1 second increments. The raw data and raw sounding file for the Skew-T Log-P graph can be viewed here.
Predicted vs. Actual Flight Path
The flight paths below represent our pre-flight predicted flight path (purple) and our actual measured flight path (red) from the flight computer.
Technical Specifications
Buy a Shirt & Keep Us Flying!
